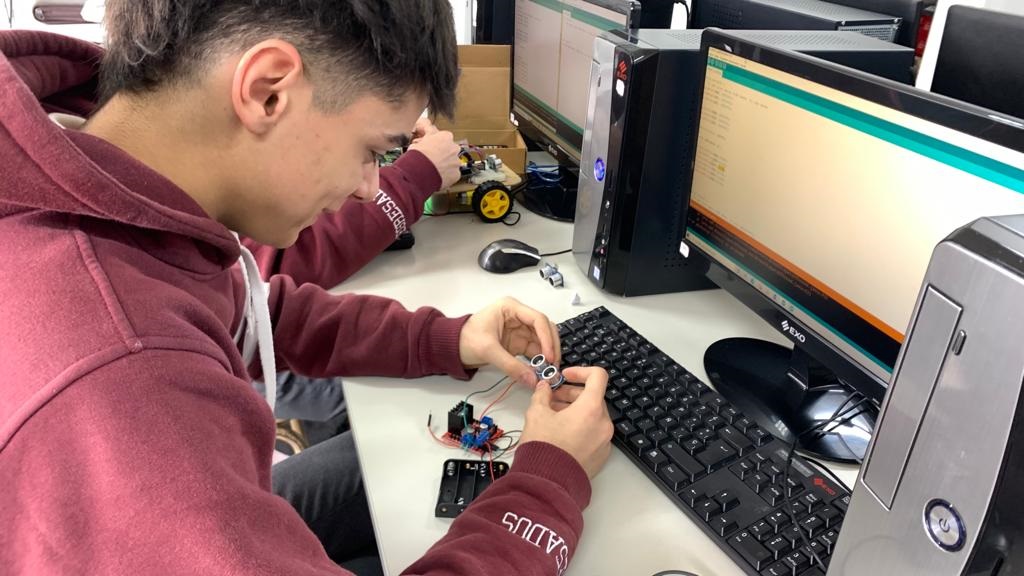

El taller de robótica comenzó el año trabajando los principios básicos de programación en microcontroladores Arduino. Programaron semáforos, semáforos dobles ( cruces de esquinas), sensores de humedad de suelo, de temperatura y sensores de distancia ultrasónicos y pulsadores.
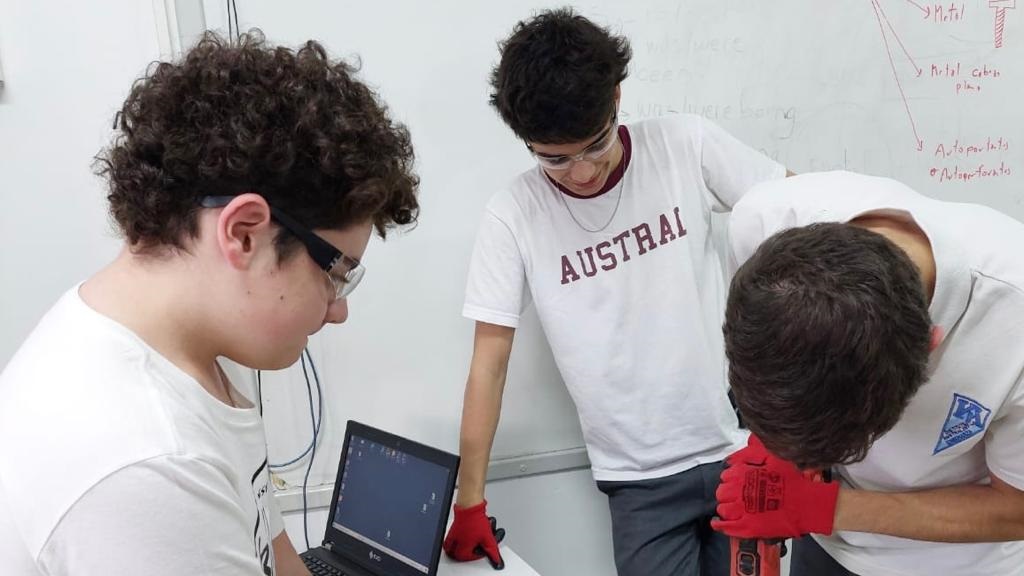
Por otro lado construyeron un medidor de pulso que muestra los ppm de la persona y trabajamos con controles remotos IR. Luego programaron servo motores para finalmente aprender a manejar motores con cajas reductoras comandados por un módulo L298N (PUENTE H) que les permitió alimentar los mismos con tensión y corriente mayor a la que Arduino puede entregar. El nuevo desafío es la construcción de robots donde aplican y combinan lo trabajado hasta aquí.